【BEV】BEV模型开山论文——Lift-Splat-Shoot
论文
论文的题目是:《LSS: Lift, Splat, Shoot: Encoding Images from Arbitrary Camera Rigs by Implicitly Unprojecting》
其核心思想是通过显示估计图像的深度信息,对采集到的环视图像进行特征提取,根据估计出来的离散深度信息,实现图像特征向BEV特征的转换,进而完成自动驾驶中的语义分割任务。
Lift
提取图像特征,然后将每个图片从二维提升到统一的三维坐标系下,得到像素点在3D空间中的特征,作者将每个像素点都生成所有可能深度,得到一组离散化的深度空间,对应一个棱台状的空间点云分布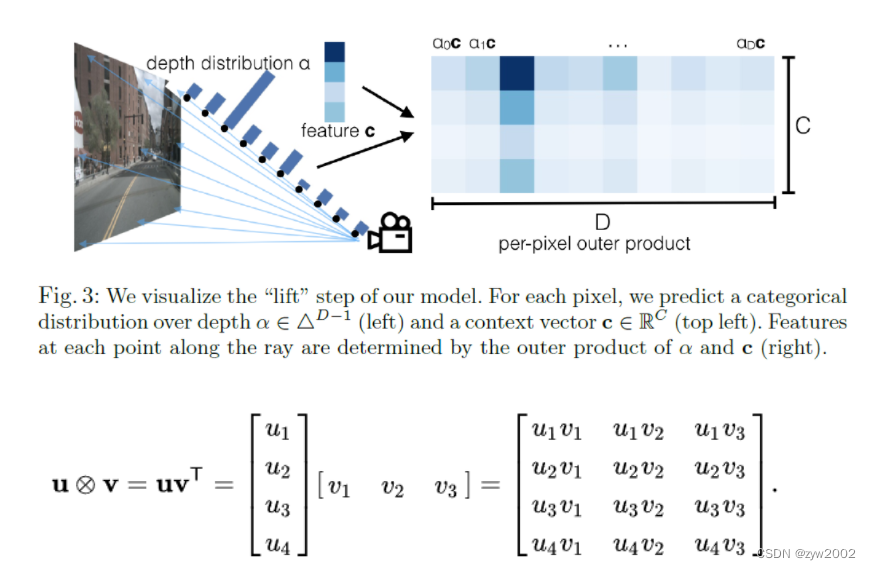
Splat
将Lift得到的点云转化成Pillars(无限高的体素),就是将点分配到离他最近的Pillars中,然后求和池化得到一个C*H*W的张量,对这个张量进行CNN可以得到鸟瞰图的预测结果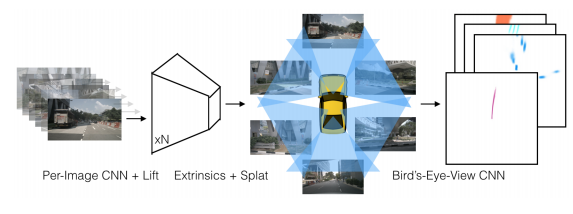
Shoot
对splat得到的特征进行编解码处理,可以看作是bev特征提取器,将编解码后的特征用于目标任务
代码
学习链接:手撕BEV的开山之作
复现
https://github.com/nv-tlabs/lift-splat-shoot
首先需要用到nuscenes数据集(https://www.nuscenes.org),下载mini的完整数据集以及map extension 1.3
然后下载预训练的模型: https://drive.google.com/file/d/18fy-6beTFTZx5SrYLs9Xk7cY-fGSm7kw/view?usp=sharing
然后可以运行如下代码生成鸟瞰图:
1 | |
参考
https://blog.csdn.net/zyw2002/article/details/127906938
https://blog.csdn.net/CV_Autobot/article/details/128213478
https://blog.csdn.net/weixin_41803339/article/details/127140039
https://blog.csdn.net/weixin_42108183/article/details/128524399?spm=1001.2014.3001.5501