【BEV】伪雷达点云—Pseudo-LiDAR
论文
论文探讨了基于图像的3D感知和基于LiDAR的3D感知之间的差异,指出基于图像方法的不足,提出了Pseudo-LiDAR来从图像建立点云数据进行感知任务。
Image-based 3D Perception 劣势原因
不准确的深度信息
图像2D的表示方式
后者是造成2维卷积在基于图像的感知任务中使图像扭曲的原因。作者分析了两个主要问题:一是不同物体间应该不连贯,但2D图像中不同深度的物体均在一个平面上(不像点云那种,不同深度不连贯);二是前后景不同尺度,2D图像远处物体由于透视原因尺度较小,检测成为一个较难的问题(雷达点云则能保持三维空间中原始的尺度)。
Pseudo-LiDAR 流程
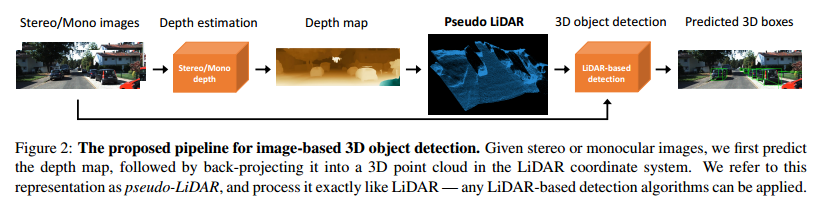
其首先利用图像深度预测模型(如DRON、PSMNET)从单目或立体图像获取对应深度图像;然后将原图像和深度信息结合得到伪雷达点云,将像素反投影到3D坐标中,得到点云;最后用伪点云代替原始雷达点云,在基于点云的感知模型中进行感知任务(如F-PointNet、AVOD)。
代码
https://github.com/mileyan/pseudo_lidar
参考
https://blog.csdn.net/weixin_41965898/article/details/119953338
https://zhuanlan.zhihu.com/p/52803631
【BEV】伪雷达点云—Pseudo-LiDAR
http://nuaa.life/2023/10/30/pseudo-LiDAR/