【BEV】BEVFusion——基于BEV表征的多任务多传感器融合
论文
论文的题目是:*《BEVFusion: Multi-Task Multi-Sensor Fusion with Unified Bird’s-Eye View Representation》*
本文提出的BEVFusion是一种多任务多传感器融合框架,其统一BEV表征空间中的多模态特征,很好地保留了几何和语义信息。为实现这一点,优化BEV池化,诊断并解除视图转换中的关键效率瓶颈,将延迟减少了40倍。BEVFusion从根本上来说是任务无关的,无缝支持不同的3D感知任务,几乎没有架构的更改。
如图所示是BEVFusion流水线概览:给定不同的感知输入,首先应用特定于模态的编码器来提取其特征;将多模态特征转换为一个统一的BEV表征,其同时保留几何和语义信息;存在的视图转换效率瓶颈,可以通过预计算和间歇降低来加速BEV池化过程;然后,将基于卷积的BEV编码器应用到统一的BEV特征中,以缓解不同特征之间的局部偏准;最后,添加一些特定任务头支持不同的3D场景理解工作。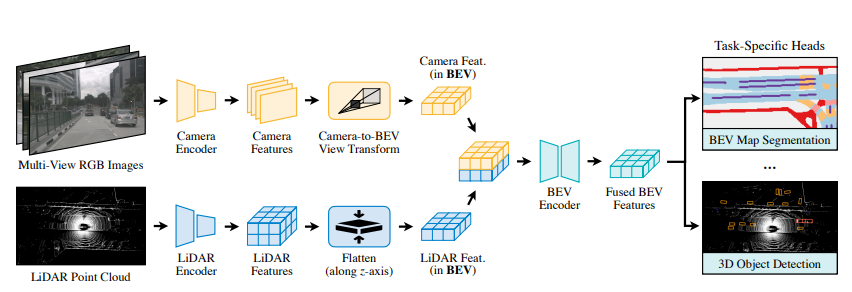
本文的关键贡献在于,优化了BEV池化操作的效率。
- 预计算
- 间歇降低
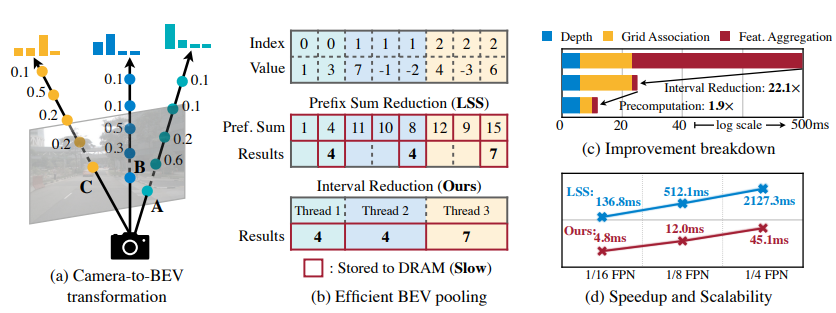
通过以上优化,使得摄像头到BEV的转换速度提高了40倍!
代码
https://github.com/mit-han-lab/bevfusion
参考
【BEV】BEVFusion——基于BEV表征的多任务多传感器融合
http://nuaa.life/2023/11/09/bevfusion/